Sway Detection and Cancellation
Project Requirements
The Trutegra crane lab has several models capable of programmable linear motion. Among other things, we use these to develop automated systems for material handling applications. Sometimes these include cranes and similar equipment that move suspended loads. “Anti-Sway” is accomplished using an idea called input shaping, and a mathematical concept called convolution. The result is that a crane or similar apparatus can move a suspended load from point to point, without any residual motion or sway. This allows both manual and automated equipment of this type to operate more efficiently. On the other hand, if a suspended load is already swaying, a means is needed to detect sway, and then execute a carefully planned move which will precisely cancel the existing sway, leaving a swinging load motionless.
This project has two parts.
1) Devise a way to accurately detect and characterize a small magnitude (< 10 deg.) of sway in a suspended load. For purposes of this exercise, we will limit the motion to one axis. Instrumentation will be chosen and tested for applicability, and must then be wired into available analog inputs on an industrial controller (Allen-Bradley or Siemens PLC).
2) Assume there is a randomly swinging load suspended below a single axis “model crane”. Plan and execute a single axis move, carefully designed to cancel the sway. When executed, this single move should leave the previously swinging load motionless. This will mean programming the PLC to control a motor which is belted to a linear stage from which a load is suspended by a cable. The interface between the controller and the motor drive is existing, as is the apparatus itself.
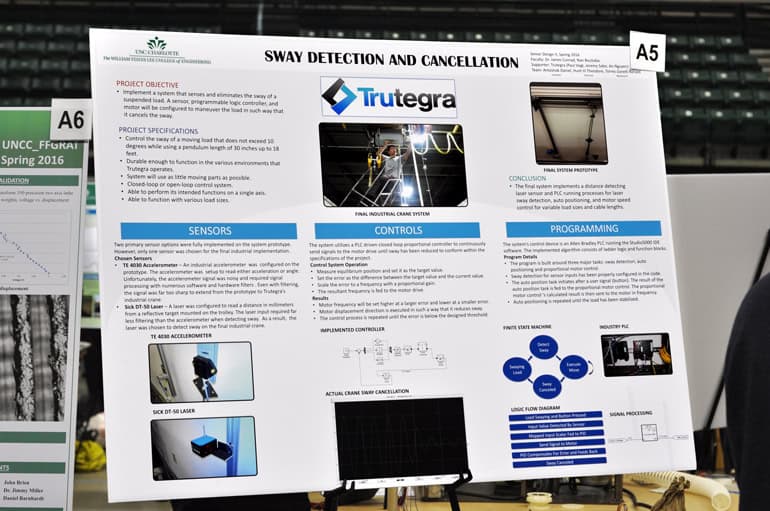
The system was controlled using an Allen Bradley PLC and programmed around 3 major tasks: sway detection, auto positioning, and proportional motor control. In its completed form, the project used a Sick DT-50 laser distance meter for detecting sway. The PLC handled a program written by the students which determined the amount of sway being detected, and executed movements which cancelled the sway.
This project was based around the Trutegra product No-Sway. Read more about it here!